
直流电机用控制器
查看分类直流电机用控制器

Specification
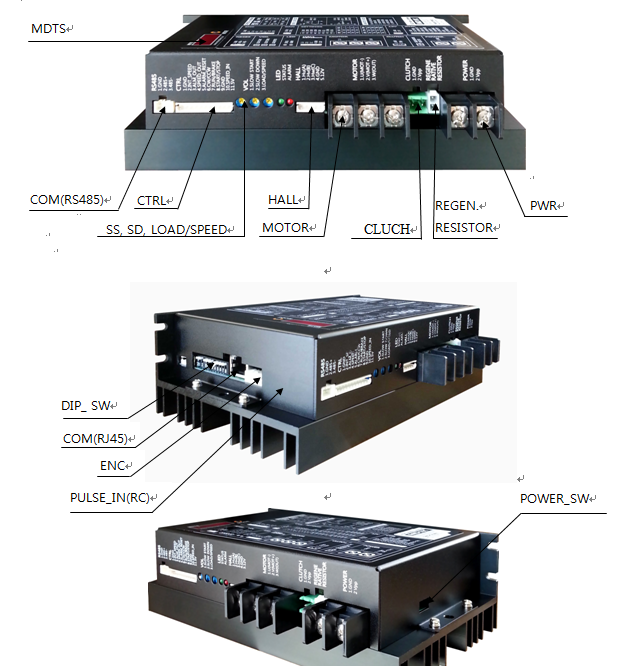
■ Input/Output
Items
Contents
Remark
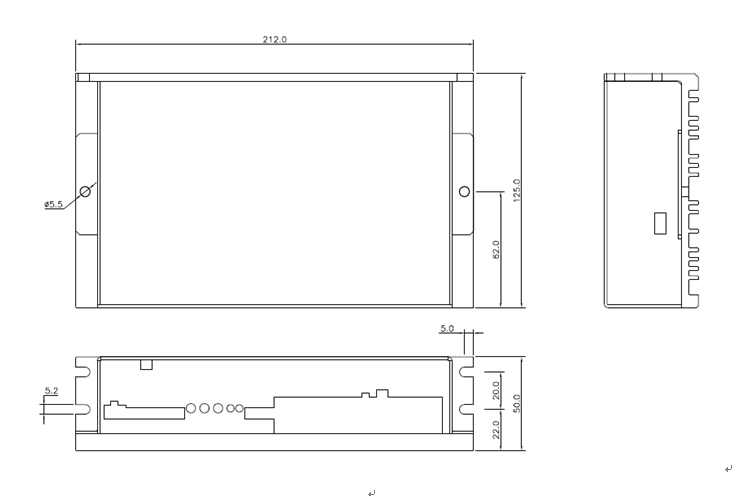
Size(mm)/Weight
(WxDxH) 212x125x50/920g
Power input, output
12~48VDC(±10%), Normal 50A
Signal
Input : pull-up, Output : open-collector type
PLC available
Communication
RS485 1ch, 19200bps and CAN 1ch, 50kbps
PLC available
Speed range
100~5,000rpm
Speed variation ratio
Less than ±1%
■LED
LED
Color
Number of blink
Contents
ALARM
RED
0, Hall fail
Hall-sensor fail or motor speed sign inversed.
1, Over load
Overload(over than 4s at max. control load)
2, Short circuit
Short circuit of motor coil or current more than 150% of max. limit.
3, Over voltage
System voltage is over than that of normal range.
4, Low voltage
Input voltage is lower than that of normal range .
5, Control fail
The motor speed is larger than 30% of reference speed during 15s.
6, Over temperature
More than 65 ℃(degree).
STATUS
GREEN
1, Normal status
Blink at 1hz on the normal CPU condition.
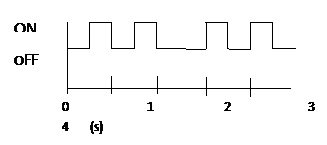
Display pattern of LED(ex, short circuit)

■ Features
-Brushless motor, 4-Q(Quadrant) PWM servo controller(with encoder)
-RS485, 0~5V Analog, or Pulse(RC radio) command modes
-CAN bus interface up to 1Mbit/s
-Operates from a single power source
-Programmable or volume current limit for protecting controller or limit system load.
-Accurate speed and odometry measurement using hall-sensor data
-Up to 7 digital speed inputs by setting I/O channels as speed step inputs.
-Quadrature encoder inputs(servo control)
-Regenerative brake resistance available, when not use a battery as a power source
-Changable for input curve(curve fitting with two points setting)
-Open loop or closed loop speed control
-Closed loop position control with communication
-Auto stop(stall alarm) if no motion is detected
-Short circuit, overvoltage and undervoltage, overtemperature protection
-Diagnostic LED
- -30°C to +65°C operating environment
-Easy configuration, tune and monitory using provided PC utility(MDAS program)
